
利用YOLOV5训练自己的数据/
执行以下命令做好准备工作
git clone https://github.com/ultralytics/yolov5 # 下载 yolov5 项目
python3 -c "from yolov5.utils.google_utils import gdrive_download; gdrive_download('1n_oKgR81BJtqk75b00eAjdv03qVCQn2f','coco128.zip')" # 下载官方例子的数据集
cd yolov5 #进入yolov5 项目文件
pip install -U -r requirements.txt #安装需求
有的人在python3 -c 下载数据集这一步出错,现提供百度云下载地址。
另附权重文件百度云下载地址。
coco128 提取码:55q6
yolov5权重文件 密码: gt7l
权重文件更新了20200728-13:33
该项目github地址:github-yolov5
1.requirements
很多人在 pip install -U -r requirements.txt 这一步报错了,比如我,那么就请手动安装吧!
依次执行 pip install
如下方式
pip install numpy==1.17
pip install python==3.7
###下面所有的需要全部装一遍,可以参照 yolov5下的 requirements.txt 文件
Python>=3.7
PyTorch>=1.5
Cython
numpy==1.17
opencv-python
torch>=1.5
matplotlib
pillow
tensorboard
PyYAML>=5.3
torchvision
scipy
tqdm
git+#subdirectory=PythonAPI
2.训练自定义数据 2.1创建Dataset.yaml
这里官方的例子使用的是coco128.yaml,这是一个小型教程数据集,由COCO train2017 中的前128张图像组成。在此示例中,这些相同的128张图像用于训练和验证。coco128.yaml定义1)训练图像目录的路径(或带有训练图像列表的* .txt文件的路径),2)与我们的验证图像相同的路径,3)类数,4)类列表名称:
#train和Val的数据集(图像目录或* .txt与图像路径文件)
train: …/coco128/images/train2017/
VAL: …/coco128/images/train2017/
#class number
nc: 80
#类名称
名称: [“人”,“自行车”你下载内容包含文件夹,需要使用百度云管家,“汽车”,“摩托车”,“飞机”,“公共汽车”,“火车”,“卡车”,“船”,“交通灯”,
“消防栓” ”,“停车标志”,“停车计时器”,“长凳”,“鸟”,“猫”,“狗”,“马”,“绵羊”,“牛”,
“大象”,“熊”,“斑马” ',‘长颈鹿’,'背包,‘雨伞’,‘手袋’,‘领带’,‘手提箱’,‘飞盘’,
‘滑雪板’,‘滑雪板’,‘运动球’,‘风筝’,‘棒球棒’,“棒球手套”,“滑板”,“冲浪板”,
“网球拍”,“瓶”,“酒杯”,“杯”,“叉”,“刀”,“勺子”,“碗”,“香蕉” ,“苹果”,
“三明治”,“橙色”,“西兰花”,“胡萝卜”,“热狗”,“比萨饼”,“甜甜圈”,“蛋糕”,“椅子”,“沙发”,
“盆栽”,“床”,“餐桌” ”你下载内容包含文件夹,需要使用百度云管家,“厕所”,“电视”,“笔记本电脑”,“鼠标”,“遥控器”,“键盘”,
“手机”,“微波炉”,“烤箱”,“烤面包机”,“水槽”,“冰箱” ,“书”,“时钟”,“花瓶”,“剪刀”,
“泰迪熊”,“吹风机”,“牙刷”]
** 如果使用自己建立的数据集 要修改的参数有
train:换成你自己的训练集地址
val:换成自己的val地址
nc: 换成你自己定义的类别的数量
类名称:换成自己定义的类别的名称
2.2创建标签
使用Labelbox和CVAT工具进行图像标记,将标签导出为darknet格式,×.txt每张图像一个文件(如果图像中没有对象,则不需要×.txt文件)。txt文件内容有:
每个图像的标签文件应该可以通过在其路径名中简单地替换/images/ *.jpg为/labels/*.txt来定位。
例如
数据集/图像/ train2017 / 000000109622.jpg #图像
数据集/标签/ train2017 /000000109622.txt #标签
具有5个人(所属类别定义为0)的标签文件
2.3组织目录
数据集/coco128放在/yolov5项目的旁边,数据集/coco128下包含两个文件夹。
一个为/coco128/images,另一个为/coco128/labels,里面分别存放数据集图片和数据集标注信息。
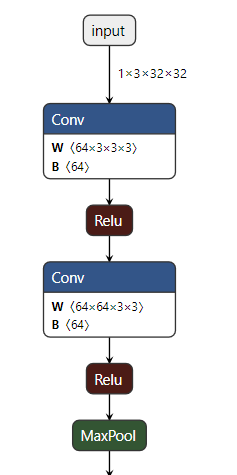
2.4选择模型
从./models文件夹中,选择模型。yolov5提供了五个模型,这里我们以yolov5s.yaml为例子,双击打开,更新其中参数适应2.1中定义的类别。这里一般不用动更新nc就可以了。就是匹配你自己数据集的类别就可以了,其他的参数一般不做优化不需要动。
#parameters
nc: 80
#number of classes depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
#anchors
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
#YOLOv5 backbone
backbone:
#[from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 1-P1/2
[-1, 1, Conv, [128, 3, 2]], # 2-P2/4
[-1, 3, Bottleneck, [128]],
[-1, 1, Conv, [256, 3, 2]], # 4-P3/8
[-1, 9, BottleneckCSP, [256, False]],
[-1, 1, Conv, [512, 3, 2]], # 6-P4/16
[-1, 9, BottleneckCSP, [512, False]],
[-1, 1, Conv, [1024, 3, 2]], # 8-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
[-1,12, BottleneckCSP, [1024, False]], # 10
#YOLOv5 head
head: [[-1, 1, nn.Conv2d, [na * (nc + 5), 1, 1, 0]], # 12 (P5/32-large)
[-2, 1, nn.Upsample, [None, 2, ‘nearest’]],
[[-1, 6], 1, Concat,[1]], # cat backbone P4
[-1, 1, Conv, [512, 1, 1]],
[-1, 3,BottleneckCSP, [512, False]],
[-1, 1, nn.Conv2d, [na * (nc + 5), 1,1, 0]], # 16 (P4/16-medium)
[-2, 1, nn.Upsample, [None, 2, ‘nearest’]],
[[-1, 4], 1, Concat,[1]], # cat backbone P3
[-1, 1, Conv, [256, 1, 1]],
[-1, 3,BottleneckCSP, [256, False]],
[-1, 1, nn.Conv2d, [na * (nc + 5), 1,1, 0]], # 21 (P3/8-small)
[[], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
2.5训练
可以从0开始训练也可以加载–cfg yolov5s.yaml --weights 通过传递匹配的权重文件从预训练的检查点进行训练:–cfg yolov5s.yaml --weights yolov5s.pt。
# Train YOLOv5s on coco128 for 5 epochs
$ python train.py --img 640 --batch 16 --epochs 5 --data ./data/coco128.yaml --cfg ./models/yolov5s.yaml --weights ''
需要调整的参数
train.py
if __name__ == '__main__':
check_git_status()
parser = argparse.ArgumentParser()
parser.add_argument('--epochs', type=int, default=5)
parser.add_argument('--batch-size', type=int, default=4)
parser.add_argument('--cfg', type=str, default='models/yolov5s.yaml', help='*.cfg path')
parser.add_argument('--data', type=str, default='data/coco128.yaml', help='*.data path')
parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='train,test sizes')
parser.add_argument('--rect', action='store_true', help='rectangular training')
parser.add_argument('--resume', action='store_true', help='resume training from last.pt')
parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
parser.add_argument('--notest', action='store_true', help='only test final epoch')
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')
parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')
parser.add_argument('--weights', type=str, default='', help='initial weights path')
parser.add_argument('--name', default='', help='renames results.txt to results_name.txt if supplied')
parser.add_argument('--device', default='0', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--adam', action='store_true', help='use adam optimizer')
parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%')
parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
opt = parser.parse_args()
epochs:指的就是训练过程中整个数据集将被迭代多少次,显卡不行你就调小点。
batch-size:一次看完多少张图片才进行权重更新,梯度下降的mini-batch,显卡不行你就调小点。
cfg:存储模型结构的配置文件
data:存储训练、测试数据的文件
img-size:输入图片宽高,显卡不行你就调小点。
rect:进行矩形训练
resume:恢复最近保存的模型开始训练
nosave:仅保存最终checkpoint
notest:仅测试最后的epoch
evolve:进化超参数
bucket:gsutil bucket
cache-images:缓存图像以加快训练速度
weights:权重文件路径
name: 重命名results.txt to results_name.txt
device:cuda device, i.e. 0 or 0,1,2,3 or cpu
adam:使用adam优化
multi-scale:多尺度训练,img-size +/- 50%
single-cls:单类别的训练集
test.py
f __name__ == '__main__':
parser = argparse.ArgumentParser(prog='test.py')
parser.add_argument('--weights', type=str, default='weights/yolov5s.pt', help='model.pt path')
parser.add_argument('--data', type=str, default='data/coco128.yaml', help='*.data path')
parser.add_argument('--batch-size', type=int, default=16, help='size of each image batch')
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.001, help='object confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.65, help='IOU threshold for NMS')
parser.add_argument('--save-json', action='store_true', help='save a cocoapi-compatible JSON results file')
parser.add_argument('--task', default='val', help="'val', 'test', 'study'")
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--merge', action='store_true', help='use Merge NMS')
parser.add_argument('--verbose', action='store_true', help='report mAP by class')
opt = parser.parse_args()
opt.save_json = opt.save_json or opt.data.endswith('coco.yaml')
opt.data = check_file(opt.data) # check file
print(opt)
同理这里的batch_size image_size ,显卡不行你就调小点。
这就解决了yolov5 训练时会出现的pytorch出现RuntimeError: CUDA out of memory.
2.6可视化
这算是yolov5提供的一个新的功能,在训练开始之后,可以通过查看train*.jpg图像以查看训练图像,标签和增强效果。
在每代训练完成后,可以通过test_batch0_gt.jpg,来看它们的标签还真是标注的边框。
可以通过查看test_batch0_pred.jpg 来查看每代的预测结果
训练的损失和性能指标保存在tensorboard和results.txt日志文件中。训练完成后results.txt绘制results.png。在这里,我显示了从coco128开始训练到100个代YOLOv5,从零开始(橙色),从预训练的yolov5s.pt权重(蓝色)开始:
3 补充 3.1 解决 KeyError: "weights/yolov5s.pt is not compatible with models/yolov5s.yaml.
这个很明显权重文件过期了,没办法,需要重新下载,下载地址
yolov5权重下载地址。
这个是谷歌云,有点慢,开VPN吧。这两天有空的话我全下载下载把百度云更新下。
下载好了放进weights文件夹就好了。
3.2解决 运行 train 然后pytorch出现RuntimeError: CUDA out of memory.
参照2.5训练,改小参数就可以了。就可以解决了
3.3 更新
目前github还在更新,定期下载更新下yolov5文件
版权声明
本文仅代表作者观点。
本文系作者授权发表,未经许可,不得转载。

发表评论